

X
注册用户
我已经拥有研发易账户,请输入账号密码登录
账号创建成功!
恭喜您! 您的新账户已经建立!
现在您可以利用会员优惠来提高您在我们网上的购物体验。
假如您对该网店操作有任何疑问, 请给店主发送邮件取得联系。
一封确认邮件已经发送到您所提供的邮箱地址。如果您在一个小时内没有收到它,请 联系我们。
退出账号
已退出登录状态,可以安全离开电脑了。
您的购物车内容已被保存,当您再次登陆后,购物车的内容将被恢复。






Intel RealSense Depth Camera D435 深度相机 实感摄像头
- ¥2,349.00
- 品牌: Intel 英特尔
- 型号:D435
- 库存状态:98
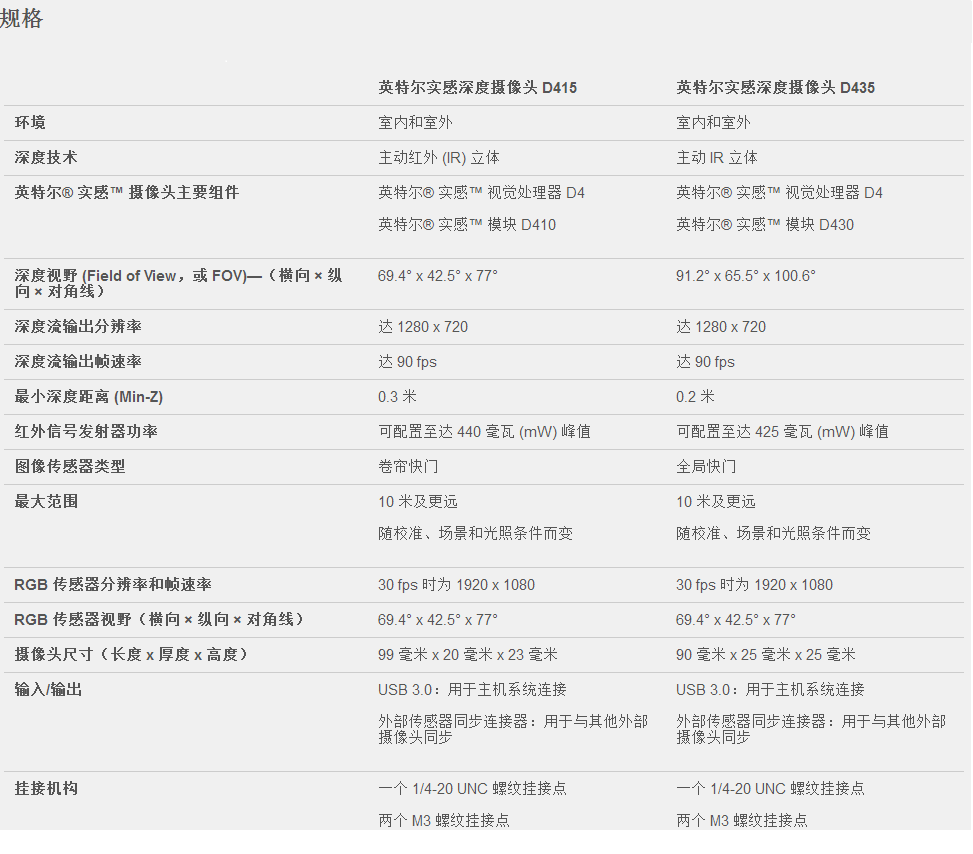
英特尔 实感 深度摄像头提供两种版本:D415 和 D435。摄像头将先进的深度感知能力带入原型开发。摄像头集成了:新的英特尔 实感 视觉处理器 D4:处理复杂的深度算法 &n..
英特尔![]() 实感
实感![]() 深度摄像头提供两种版本:D415 和 D435。摄像头将先进的深度感知能力带入原型开发。
深度摄像头提供两种版本:D415 和 D435。摄像头将先进的深度感知能力带入原型开发。
摄像头集成了:新的英特尔 实感
视觉处理器 D4:处理复杂的深度算法
立体图像传感器:捕获图像并计算图像间的差异
红外信号发射器:照明物体并收集深度数据
RGB 传感器:收集颜色数据
红外信号发射器:照明物体并收集深度数据
RGB 传感器:收集颜色数据

亮点
这两款深度摄像头都包括:
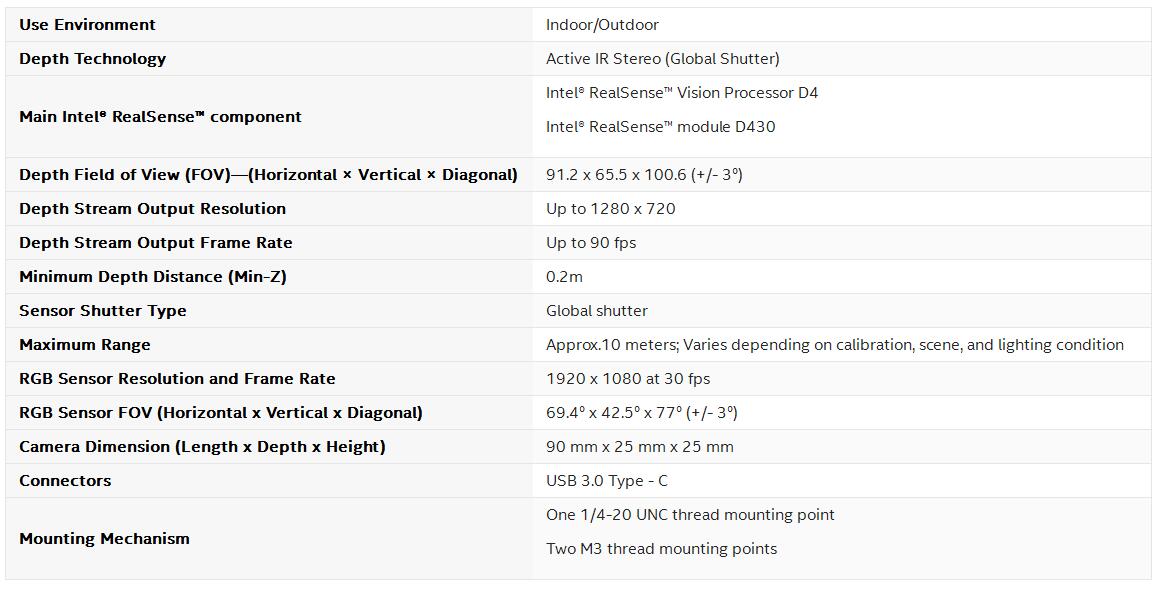
1.功能强大的视觉处理器,该处理器使用 28 纳米 (nm) 制程技术并支持达 5 个 MIPI 摄像头串行接口 2 通道,以计算实时深度图像并加速输出,从而生成高达每秒 90 帧 (fps) 的深度视频流。 这比第一代立体深度摄像头的 30 fps 要高出 60 fps。
2.一组高分辨率图像传感器,其在深度数据流中提供高达 5 倍的像素数。 这可产生达 1280 x 720 的分辨率,而第一代立体深度摄像头的分辨率为 480 x 360。
1.功能强大的视觉处理器,该处理器使用 28 纳米 (nm) 制程技术并支持达 5 个 MIPI 摄像头串行接口 2 通道,以计算实时深度图像并加速输出,从而生成高达每秒 90 帧 (fps) 的深度视频流。 这比第一代立体深度摄像头的 30 fps 要高出 60 fps。
2.一组高分辨率图像传感器,其在深度数据流中提供高达 5 倍的像素数。 这可产生达 1280 x 720 的分辨率,而第一代立体深度摄像头的分辨率为 480 x 360。
3.专用的颜色图像信号处理器用于图像校正及颜色数据缩放,从而大大提高图像质量。
高级立体深度算法和新设计,以实现更准确的深度感知及更远的范围。 通过校准,立体深度感知的误差率低至 1%。 在最适环境中,这些摄像头在室内和室外环境中均可捕获相距达 10 米的数据。
4.支持新的跨平台开源英特尔![]() 实感
实感![]() SDK 2.0,包括多种操作系统、第三方插件和环境及编程语言。
SDK 2.0,包括多种操作系统、第三方插件和环境及编程语言。
高级立体深度算法和新设计,以实现更准确的深度感知及更远的范围。 通过校准,立体深度感知的误差率低至 1%。 在最适环境中,这些摄像头在室内和室外环境中均可捕获相距达 10 米的数据。
4.支持新的跨平台开源英特尔
最低系统要求:
第六代(或以上)英特尔USB 3.0 端口
Windows
D435详情图

优点
这两款深度摄像头均搭载新的英特尔![]() 实感
实感![]() 视觉处理器和模块,以即刻可用的外形规格为原型提供计算机视觉。
视觉处理器和模块,以即刻可用的外形规格为原型提供计算机视觉。
英特尔![]() 实感
实感![]() 深度摄像头 D415 配备卷帘图像快门和标准视野,为项目提供通用解决方案,使之便于将深度流数据增添至现有系统。
深度摄像头 D415 配备卷帘图像快门和标准视野,为项目提供通用解决方案,使之便于将深度流数据增添至现有系统。
英特尔
英特尔![]() 实感
实感![]() 深度摄像头 D435 配备全局图像快门和宽视野,能够有效地捕获和串流移动物体的深度数据,从而为移动原型提供高度准确的深度感知。
深度摄像头 D435 配备全局图像快门和宽视野,能够有效地捕获和串流移动物体的深度数据,从而为移动原型提供高度准确的深度感知。

装箱清单
英特尔![]() 实感
实感![]() 深度摄像头 D435
深度摄像头 D435
USB 3.0 缆线
三脚架
安全和规章信息
USB 3.0 缆线
三脚架
安全和规章信息
开发资源
软件下载连接:https://github.com/IntelRealSense/librealsense
或向客服人员索取网盘。